新闻网讯(通讯员 王刚 李文龙)1月13日,机器人领域顶级期刊IEEE Transactions on Robotics在线刊登了机械学院数字制造装备与技术国家重点实验室李文龙教授和丁汉院士团队多机器人系统精确标定的最新研究成果“Simultaneous calibration of multi-coordinates for a dual-robot system by solving the AXB=YCZ problem”(《基于求解AXB=YCZ问题的双机器人系统多坐标系同步标定方法》)。机械学院博士研究生王刚为第一作者,李文龙教授为通讯作者,多伦多大学机器人研究所刘行健博士和机械学院丁汉院士为共同作者。
以机器人作为制造装备执行体的机器人化制造正逐渐成为大型复杂构件智能制造的新趋势。相比数控机床,多机器人加工具有运动灵活度高、工作空间大、拓扑结构可变、多机并行协调作业能力强等优势,易于与多模态感知、人工智能、人机交互等技术无缝集成,大大提升制造系统的灵巧性和人机交互能力,在航空、航天、能源、汽车等国家战略领域大型复杂构件高效高性能制造中具有广泛的应用前景,代表着智能制造的前沿发展方向。
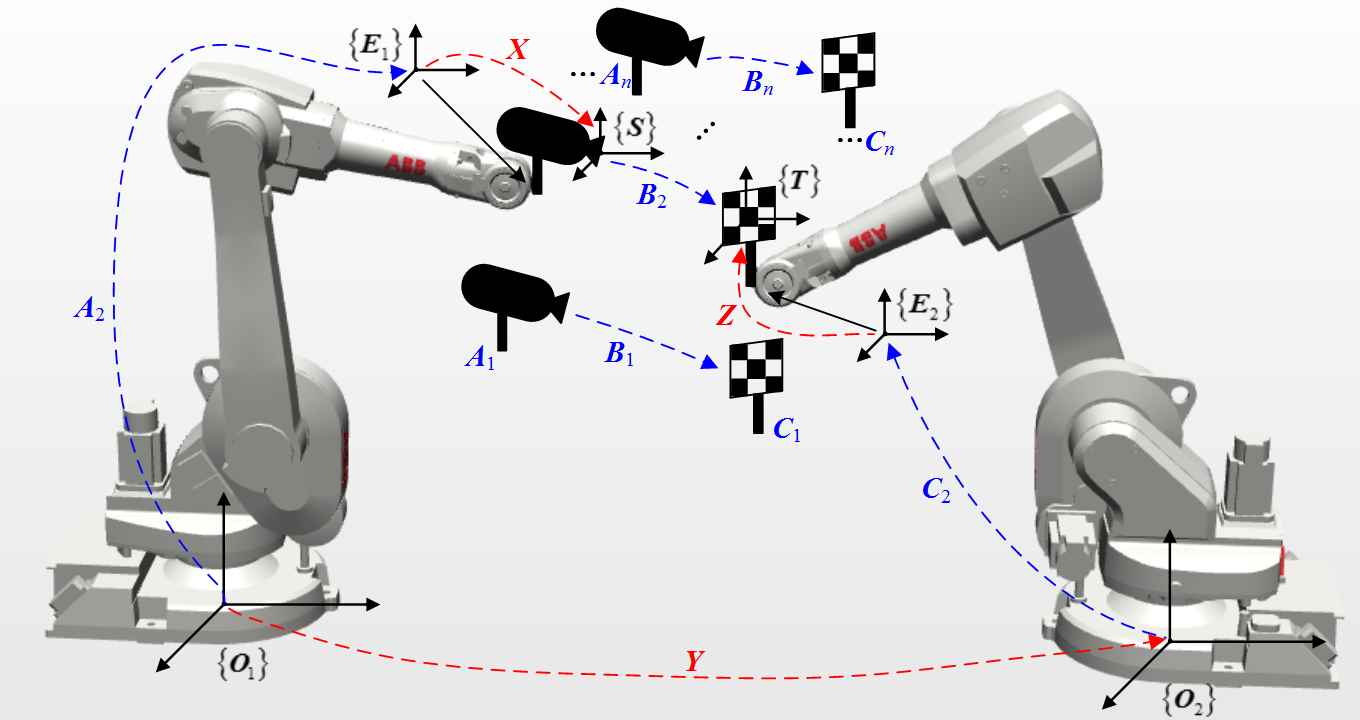
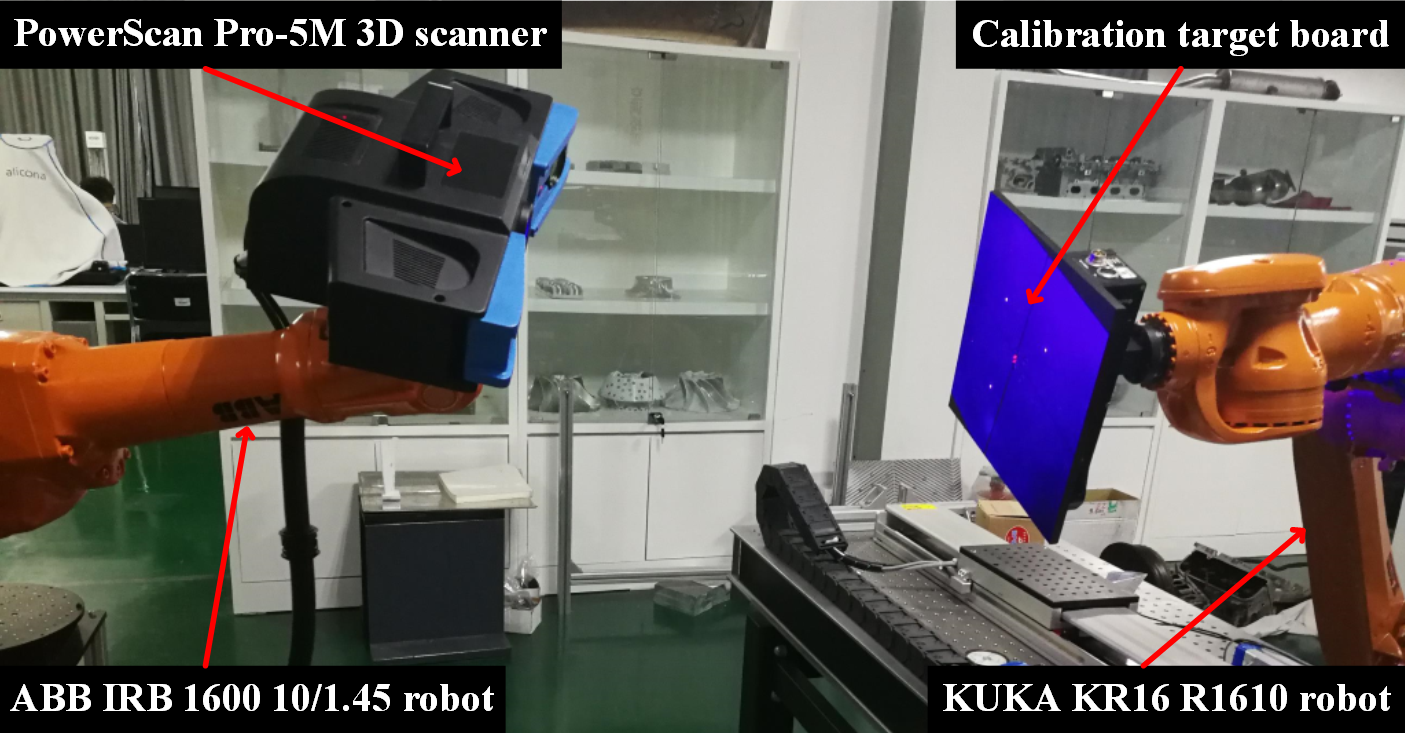
多机器人系统协同作业的前提是精确标定其空间位姿关系,下图所示为一种典型的双机器人操作系统。传统标定方法一般对未知矩阵X、Y、Z进行分步骤标定,标定操作过程繁琐冗长,易导致多步骤标定误差累积,大大降低多机器人系统协同操作精度。本团队建立形如AXB=YCZ的双机器人系统标定数学模型,提出一种未知矩阵X、Y、Z同步标定求解新方法,该方法由一种基于Kronecker积的封闭求解方法和一种将复杂非线性问题转化为线性问题的迭代求解方法组成,封闭求解方法用于快速计算较优初始值,可提升迭代求解的收敛速度和稳定性。仿真实验和实际实验表明,所提方法计算效率相比香港中文大学提出的最新方法提升90%以上,经过t检验,标定精度提升的置信概率在95%以上。
该项研究工作为提升多机器人协同作业系统的加工精度和现场操作效率提供了新原理新方法,可推广应用于本团队研制的大型风电叶片(长度>60 m)、高铁白车身(长度>22 m)等大型复杂构件多机器人协同测量与智能化打磨。


该工作得到国家自然科学基金重点项目“大型复杂零件机器人加工理论与技术”(No. 51535004)、国家自然科学基金面上项目“飞机蒙皮零件机器人在位测量与数据处理”(No. 52075203)和湖北省重点研发计划“复杂零件在线自动化三维视觉检测技术与装备研发”(2020BAA025)的联合资助,是丁汉院士负责的国家自然科学基金委员会“共融机器人基础理论与关键技术研究”重大研究计划的重要组成部分,一直以来受到了丁汉院士领衔的专家组的大力指导。
论文链接:https://ieeexplore.ieee.org/document/9319563




