新闻网讯 6月20日,航空航天学院流固耦合力学研究团队在仿生流体力学和流动控制减阻等领域取得新进展,相关研究成果分别在Journal of Fluid Mechanics(简称JFM)第941期(2022年4月27日)和第943期(2022年6月20日)发表。JFM由剑桥大学著名应用数学和流体力学家乔治·巴彻勒(George Batchelor)于1956年创办,是流体力学领域享有盛誉的顶级期刊。
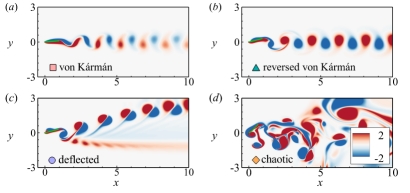
图为仿生拍动板的典型尾迹
生物游动和飞行蕴含着复杂的力学原理,长期以来引起了人们极大的研究兴趣。生物的“推进器”通常是具有柔性的薄壁结构,如蜻蜓双翅、鱼鳍等,其在流体中运动时会产生被动或主动变形。探究生物结构柔性对其动力学性能和尾迹特性的影响是该领域最受关注的研究课题之一。研究团队采用数值模拟方法研究了拍动柔性薄板的尾迹模态和推-阻力转捩特性,并在参数空间给出了尾迹模态和推-阻力转捩边界曲线[1]。研究人员提出了一个统一的物理量,从而将拍动板复杂的运动学和动力学(包括尾迹演化、推进性能等)联系起来,进而给出了系统推-阻力/尾迹转捩特性和推进性能的标度律。这一新物理量可以在广泛的参数范围内刻画拍动推进系统的自相似特性,为生物飞行与游动的基本力学原理提供了新见解。该研究也可为仿生飞行器和潜航器设计优化提供理论支撑。这项研究发表于JFM Rapid专栏,该专栏旨在快速发表流体力学领域中具有高影响力的短篇论文。

图为柔性软尾的典型模态和尾涡结构
钝体绕流的减阻问题一直以来是流体力学的核心课题之一。受到自然界中生物巧妙利用被动柔性实现减阻的启发,人们提出了一种“软尾减阻”的新型流动控制方法。研究人员通过数值模拟研究了一种新颖的流固耦合系统[2],即在钝体绕流问题中,通过在钝体后部安装一封闭柔性结构(“软尾”)以自适应调节系统的动力学行为。通过研究发现,在相当广泛的参数范围内,“软尾”可以产生有益的流动干扰实现流动控制,从而降低系统阻力(最大减阻可达20%)。研究人员进一步分析了“软尾减阻”的流固耦合机制,分别提出了压差阻力和粘性阻力的尺度律,并给出了系统总阻力的预测公式。
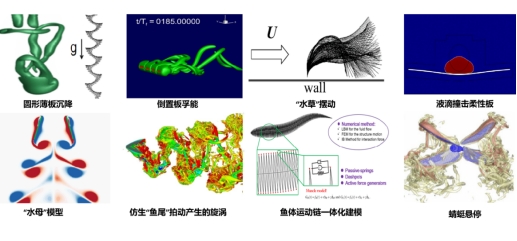
图为团队成员开展的研究实例
论文信息:
[1] Peng, Z.-R., Sun, Y., Yang, D., Xiong, Y., Wang, L., & Wang, L. (2022), Scaling laws for drag-to-thrust transition and propulsive performance in pitching flexible plates.J. Fluid Mech., 941, R2. doi:10.1017/jfm.2022.268
[2] Sun, Y., Peng, Z.-R., Yang, D., Xiong, Y., Wang, L., & Wang, L. (2022), Dynamics of a rigid-flexible coupling system in a uniform flow.J. Fluid Mech., 943, A44. doi:10.1017/jfm.2022.466




