新闻网讯(通讯员 申长青 张小俭)5月10日,机器人领域权威期刊International Journal of Robotics Research(国际机器人研究杂志)在线刊发了机械学院丁汉院士团队关于全覆盖轨迹规划的最新研究成果“Spiral Complete Coverage Path Planning Based on Conformal Slit Mapping in Multi-connected Domains”(多连通域上基于共形狭缝映射的螺旋全覆盖轨迹规划)。论文受到期刊编辑Michael Otte博士的推荐。我校智能制造装备与技术全国重点实验室为论文唯一完成单位,机械学院博士生申长青为论文第一作者,张小俭教授为论文通讯作者,丁汉院士,严思杰教授,博士生毛思豪、徐丙州、王子玮为共同作者。
机器人化智能制造是智能化制造发展的主攻方向,是突破大型复杂构件高性能制造“卡脖子”技术瓶颈的利器。作为机器人化智能制造核心技术之一的路径规划技术,对机器人的运动效率、安全性和智能性起着决定性的作用。
螺旋全覆盖轨迹具有转向平滑、间断少的优点,有利于执行器平稳光顺地运行,在机器人加工、3D打印、扫地等领域应用广泛。但当前螺旋覆盖模式面临的一个共性问题是无法将单条螺旋线嵌入到多连通区域中。因此,对于有窗高铁车身、有障碍室内环境等多连通区域,需要先将多连通区域分割成若干子区域,再将每个子区域通过螺旋线覆盖,这导致最终生成的加工轨迹间断多、路径长、转向剧烈。论文基于共形狭缝映射提出了一种将单条螺旋线嵌入多连通区域的方法,使得单条螺旋轨迹可覆盖多连通区域,相比传统需分割子区域的PDE(partial differential equation)螺旋轨迹生成算法,新算法路径长度、转向剧烈程度等关键指标都得到了下降。
论文提出基于最大内接圆控制相邻狭缝映射的等参线间距,避免了因等参线之间存在孔洞带来的轨迹间距难以分析与控制的问题。为避免螺旋轨迹穿越孔洞,论文将狭缝映射的等参线螺旋化问题转化成以周期狭缝为障碍的穿越避障问题,最终实现了不穿越孔洞的等参线螺旋化。论文分析了新算法复杂度上限,并通过仿真论证了在各类场景中新算法的普适性与鲁棒性。
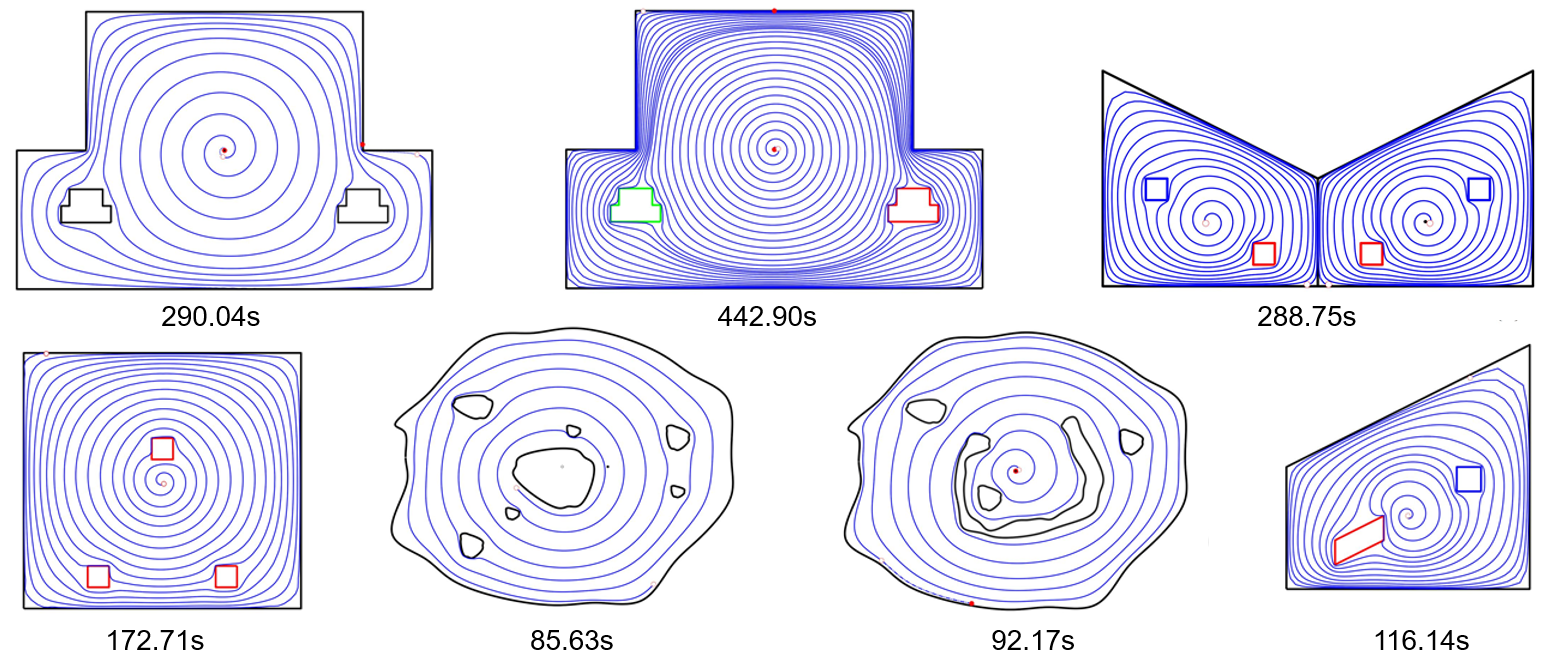
图为在不同多连通区域上生成的螺旋全覆盖轨迹及运算耗时
论文设计了型腔铣削实验与空切实验,比较了新算法与传统基于PDE算法在覆盖率、加工时间、执行器转向冲击方面的指标差异。型腔铣削实验表明,新算法和传统算法同样可以保证覆盖率达到100%;空切实验表明,新算法相比传统算法轨迹总长度减少、转向剧烈程度减轻,全覆盖用时以及执行器转向冲击分别同时下降了12.33%和22.78%。
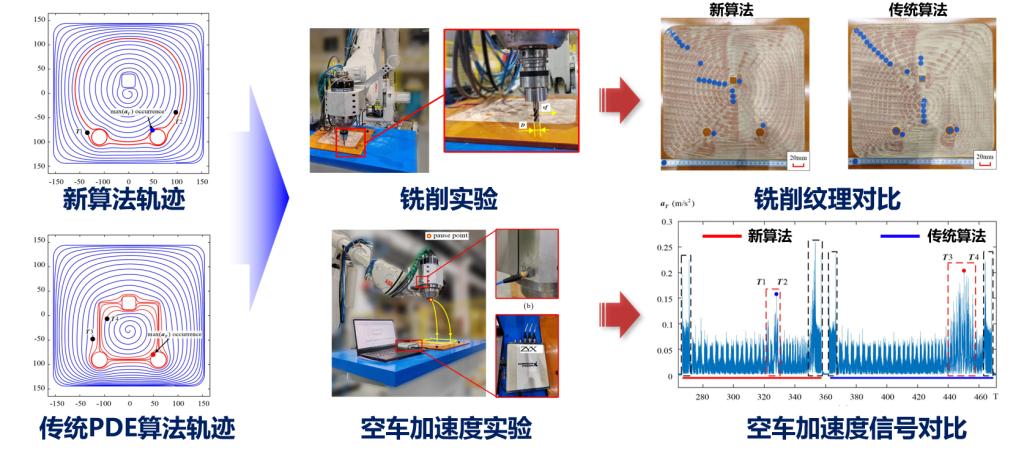
图为两种算法在不同实验下的对比
该项研究工作得到国家自然科学基础科学中心项目“机器人化智能制造”和国家自然科学面上基金项目“大型风洞构件机器人铣削振动机理与在线抑制方法研究”的资助。
论文链接:
https://journals.sagepub.com/doi/10.1177/02783649241251385




