新闻网讯 7月2日,我校生命学院刘智教授团队与天津大学化学工程与技术学院赵坤教授团队,布里斯托尔大学数学学院Rachel R Bennett教授,筑波大学Andrew S Utada教授在《elife》(中科院分区1区)发表了合作研究的新成果,题为《Crash landing ofVibrio choleraeby MSHA pili-assisted braking and anchoring in a viscoelastic environment》。天津大学化学工程与技术学院张文超博士和我校生命学院博士生罗美为共同第一作者。共同通讯作者为刘智教授,赵坤教授,Rachel R Bennett教授,Andrew S Utada教授。
霍乱弧菌是一种非侵入性的肠道细菌,是腹泻性疾病霍乱的致病菌。霍乱弧菌着陆和定殖到粘弹性的环境如小肠粘液层,是感染人体至关重要的一步。但是,细菌着陆的机制,特别是在粘弹性环境中,很大程度上仍然是未知的。甘露糖敏感的血凝素(MSHA)菌毛和鞭毛对霍乱弧菌的表面附着至关重要,结合基于半胱氨酸替换的标记方法和单细胞追踪技术,我们在粘弹性非牛顿溶液中定量描述霍乱弧菌MSHA菌毛和鞭毛的着陆特点。
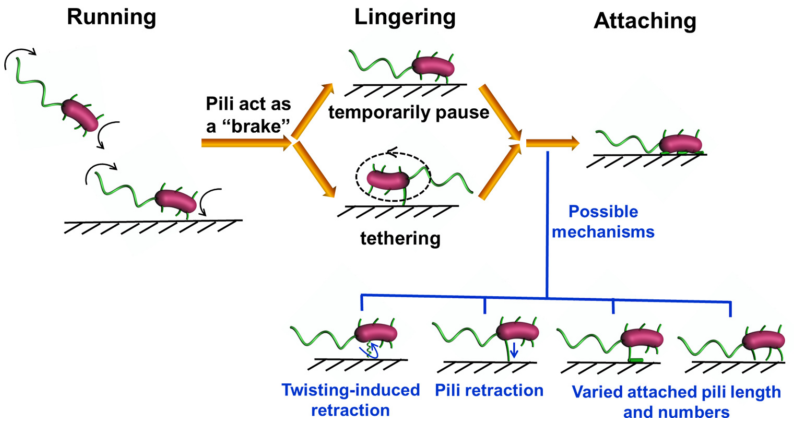
结果显示,MSHA的菌毛均匀地分布在细菌上,并用任意一点粘附到物体表面。有了这样的特点,MSHA纤毛在细菌着陆过程中充当制动和锚定的功能。由此提出并验证了霍乱弧菌着陆的模型,包括三个阶段:运行、徘徊和附着。

进一步研究MSHA菌毛的功能以及由此产生的细菌着陆对粘弹性的依赖性,研究团队比较了细菌运动行为。本文观察到,粘弹性溶液的弹性特性也可以影响细菌的运动行为。在细菌着陆中,MSHA菌毛作为制动和锚定的作用在粘弹性(非牛顿)流体中比在粘性牛顿流体中更明显。研究团队的工作阐述了霍乱弧菌在粘弹性条件下着陆的动态变化机制,揭示了真实的粘液环境中霍乱弧菌着陆的情况,为更好地控制霍乱弧菌感染提供参考。
本研究受到国家重点研发计划和国家自然科学基金等项目支持。
文章链接:https://elifesciences.org/articles/60655




